

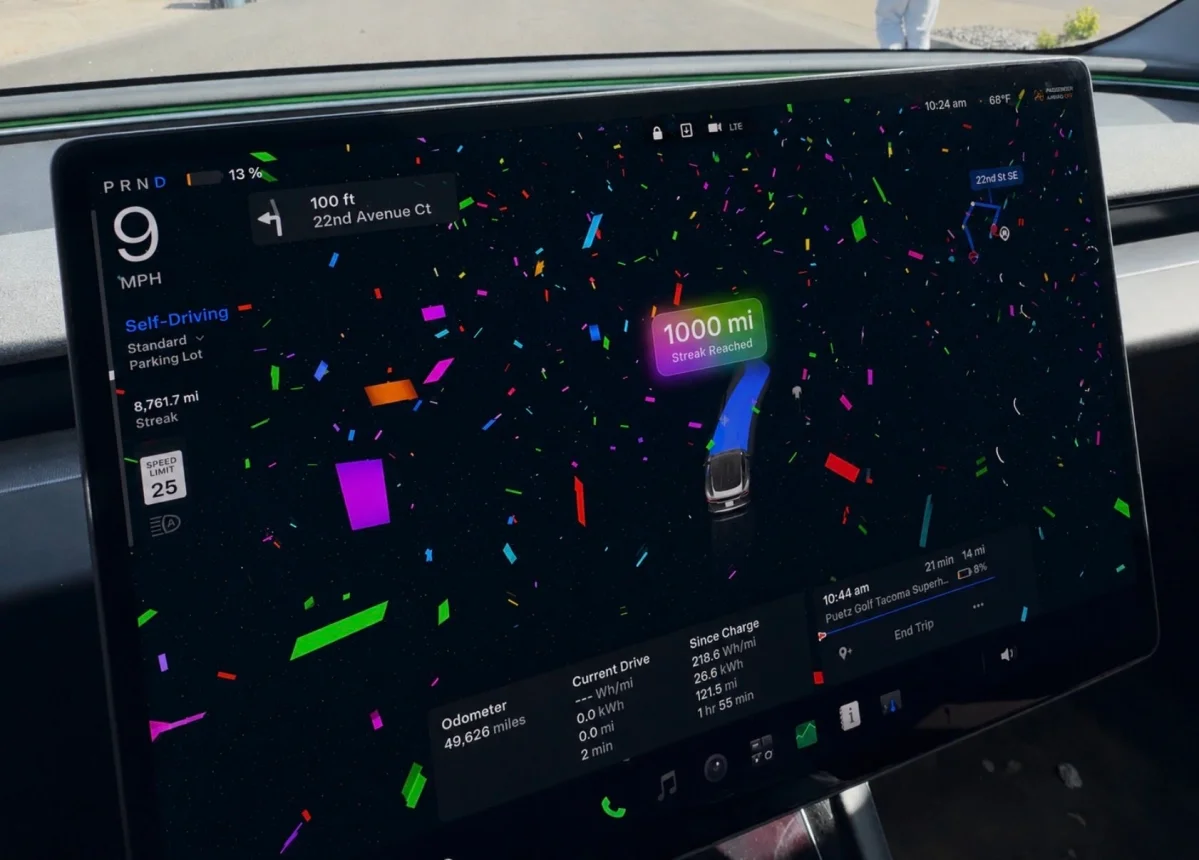
Otonom sürüş teknolojilerini kitlesel pazara ulaştırma konusunda en agresif stratejiyi izleyen Tesla, Full Self-Driving (Gözetimli FSD) ekosistemini hızla güncelliyor. Şirketin erken erişim test kullanıcılarına dağıtmaya başladığı en yeni FSD v14.3.4 sürümü (yazılım kodu 2026.14.6.10), hem eğlenceli arayüz yeniliklerini hem de uzun süredir beklenen altyapı çözümlerini bir arada sunuyor. İlk gün konsensüsüne bakıldığında Model 3, Model Y ve özellikle Cybertruck sahiplerinden gelen geri bildirimler genel olarak son derece olumlu bir tablo çiziyor. Yeni sürüm, otonom sürüş millerini konfeti yağmuruyla kutlayan eğlenceli “Streak” sisteminin yanı sıra, Cybertruck için “Actually Smart Summon” (Gerçekten Akıllı Çağırma) gibi kritik özellikleri de aktif hale getiriyor. Ancak her majör yapay zeka güncellemesinde olduğu gibi, bu yeni derlemede de sürüş konforunu etkileyen bazı yazılımsal gerilemeler (regresyonlar) göze çarpıyor. İşte ilk gerçek dünya testlerinin ardından öne çıkan tüm detaylar.
Şehir İçi Sürüş Kararlılığı ve “Mad Max” Profilinin Doğuşu
Tesla kullanıcılarının bir önceki v14.3.3 point sürümünde en çok şikayet ettiği konuların başında, düşük hızlardaki kararsızlık ve direksiyon simidinde yaşanan titreme (jitter) sorunları geliyordu. Özellikle dar sokaklarda veya yoğun şehir içi trafiğinde sistemin sürekli küçük kararsız hamleler yapması sürüş konforunu olumsuz etkiliyordu. Yeni yayınlanan FSD v14.3.4 güncellemesiyle birlikte bu düşük hız kararsızlığının çok büyük ölçüde çözüldüğü ve sistemin şehir içi caddelerde çok daha kendinden emin bir direksiyon hakimiyeti sergilediği bildiriliyor. Bu kararlılık artışı, özellikle aktif yol çalışma ve inşaat bölgelerinden geçerken net bir şekilde hissediliyor. Eski sürümler flaşörlü tabelaları veya inşaat dubalarını gördüğünde sürekli olarak kesik kesik frene basma eğilimi gösterirken, yeni yapay zeka vision encoder (görüntü kodlayıcı) altyapısı karmaşık görselleri çok daha kararlı bir şekilde işleyerek akıcı ve sarsıntısız bir geçiş sağlıyor.
Sürüş profilleri arasında daha agresif, hızlı ve kararlı şerit değişikliklerini tercih eden kullanıcıların favorisi olan Mad Max modu, bu güncellemeyle birlikte eski keskin ve kararlı yapısına yeniden kavuştu. Son birkaç ara güncellemede garip bir şekilde pasifleşen ve insan benzeri reflekslerini kaybeden bu profil, v14.3.3 sürümündeki o hantal ve çekingen yapısından tamamen sıyrılmış durumda. Yoğun şehir içi caddelerinde ve otoyol bağlantılarında trafiğin akışını akıllıca analiz eden sistem, şerit değiştirme veya yoğun trafiğe kaynak yapma (kesme) hamlelerini tıpkı deneyimli bir insan sürücü gibi çok daha doğal ve akıcı reflekslerle yerine getiriyor.
Aşağıdaki tabloda, Tesla FSD v14.3.4 sürümünde kullanıcı deneyimini doğrudan etkileyen iyileşmeler ve test sürecinde fark edilen regresyonlar karşılaştırmalı olarak listelenmiştir:
| Geliştirilen Özellikler ve Yenilikler (Artılar) | Tespit Edilen Regresyonlar ve Sorunlar (Eksiler) |
| Düşük Hız Kararlılığı: Direksiyon titremeleri (jitter) ve inşaat alanlarındaki ani frenleme eğilimleri tamamen giderildi. | Navigasyon Dönüş Kaçırma: Sistem, özellikle otoyol çıkışlarında ve kırsal bölgelerdeki keskin dönüşlerde sapakları ıskalayabiliyor. |
| Mad Max Profil Güncellemesi: Şerit değiştirme ve yoğun trafiğe girme manevraları çok daha agresif, insan benzeri ve kararlı hale geldi. | Sürekli Rota Yenileme: Dönüş kaçırma hatası nedeniyle aracın navigasyon haritası üzerinde sık sık yeniden rota (re-routing) hesaplaması gerekiyor. |
| Gelişmiş Pull Over Özelliği: Eski “Curbside” yerine gelen bu mod, aracı rastgele bir kaldırım kenarı yerine doğrudan bina girişine park ediyor. | Kırsal Bölge Kararsızlığı: Harita verilerinin ve şerit çizgilerinin net olmadığı taşra yollarında çıkış manevraları feyk atabiliyor. |
| Robotaxi Hazır Arayüzü: Yolcu odaklı varış bildirimleri, merkezi rota onay ekranları ve yeni varış pini harita görselleştirmeleri eklendi. | Erken Erişim Sınırlandırması: Yazılım henüz geniş kitlelere açılmadığı için uç senaryo (edge-case) hata raporlamaları devam ediyor. |
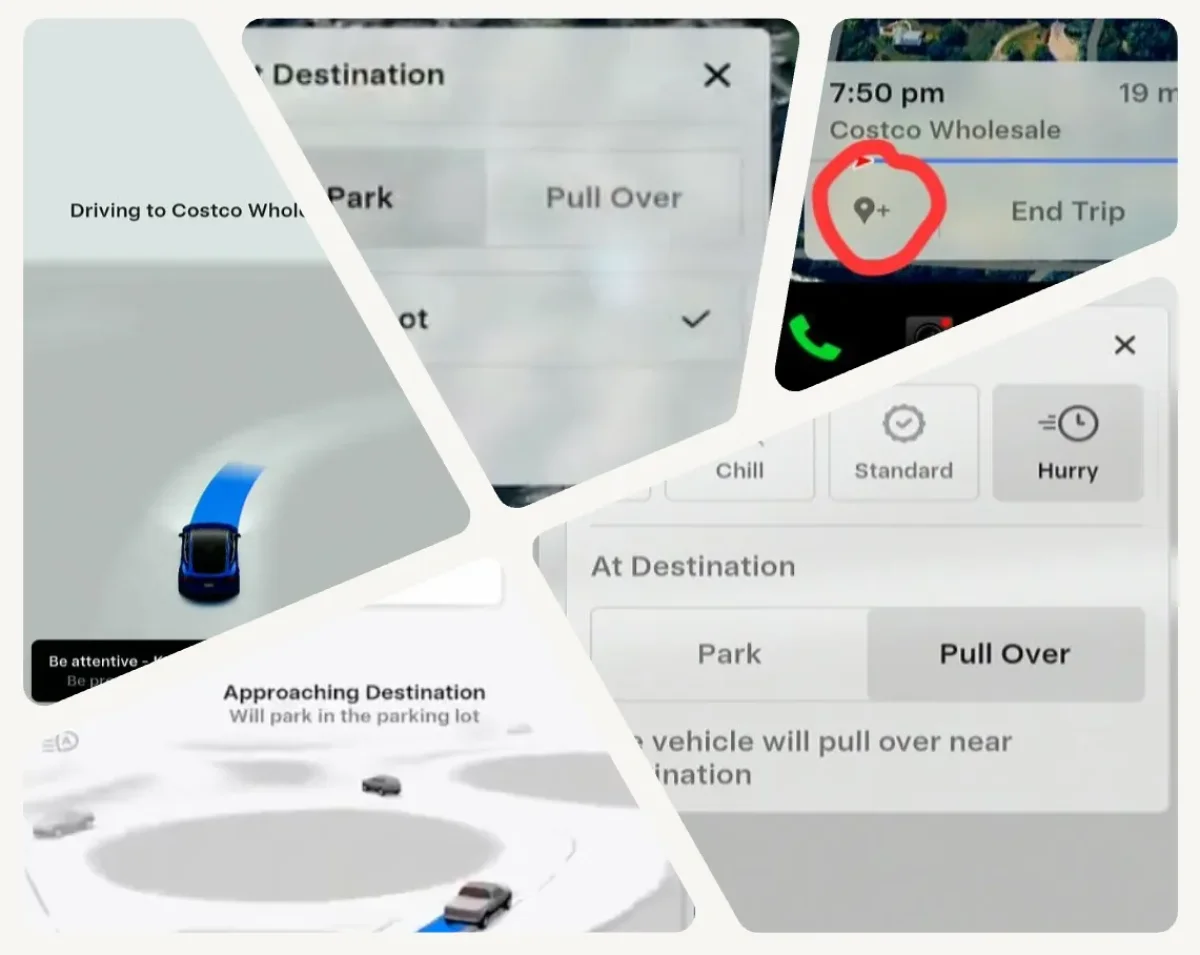
Yeni “Pull Over” Park Modu ve Robotaxi Tasarım Dilinin İzleri
Tesla mühendisleri, bu yeni yazılım derlemesinde arka plandaki sinir ağlarını (neural networks) optimize etmenin yanı sıra, kullanıcı arayüzünü de gelecekteki sürücüsüz araç vizyonuna hazırlıyor. Bunun en net örneği, eski “Curbside” (Kaldırım Kenarı) park seçeneğinin tamamen kaldırılarak yerine gelen yeni Pull Over seçeneği ile görülüyor. Eski sistem, varış noktasına yaklaştığında aracı sadece o bölgeye yakın herhangi bir kaldırım kenarına yanaştırıyordu ve bu durum genellikle binanın ana giriş kapısından uzak noktalarda durulmasıyla sonuçlanıyordu. Yeni geliştirilen yeni Pull Over seçeneği ise harita verilerindeki ve kameralardaki detayları birleştirerek doğrudan gitmek istediğiniz mekanın fiziksel giriş kapısını, yolcu indirme ceplerini (drop-off loops) veya güvenli park ceplerini tespit ediyor. Araç böylece sizi rastgele bir sokak ortasında bırakmak yerine, tam olarak kapının önüne kadar güvenle ulaştırıyor.
Geliştirilen bu yeni park mekanizması, güncellenen varış pencereleri, merkezi rota onay butonları ve yapay zeka destekli predictive (öngörülü) varış bildirimleri ile birleştiğinde, araç içi ekran deneyimi tamamen bir “Robotaxi” yolculuğu hissi uyandırıyor. Sürücüden ziyade arkada oturan bir yolcuya bilgi veriyormuş gibi tasarlanan bu passenger-centric (yolcu odaklı) arayüz mimarisi, markanın gelecekteki ticari otonom araç planlarının yazılımsal altyapısını oluşturuyor.
Üst veri kutusu bölmesini yeniden boyutlandırmak için yukarı ve aşağı ok tuşlarını kullanın.
Ancak tüm bu harika teknolojik ilerlemelerin yanında, yazılımın bir erken erişim derlemesi olduğunu hatırlatan can sıkıcı bir regresyon da bulunuyor. Birçok test kullanıcısı, FSD sisteminin özellikle otoyol çıkışlarında ve şerit çizgilerinin net olmadığı kırsal yol ayrımlarında navigasyon dönüşlerini kaçırma eğilimi gösterdiğini raporluyor. Kritik bir güvenlik riski oluşturmasa da aracın çıkışı kaçırıp sürekli olarak harita üzerinde yeniden rota hesaplamak zorunda kalması kullanıcı deneyimini baltalıyor. Tesla’nın bu spesifik dönüş ve çıkış kaçırma hatasını gidermek adına, yazılımı tüm küresel filoya geniş çapta dağıtmadan önce yeni bir küçük yama (point release) güncellemesi yayınlaması kuvvetle muhtemel görünüyor.







Leave a Reply